KiPneu
Designing a Constructive Pneumatic Platform for Biomimicry Learning
Role
Mechanical Engineer (Shell Bricks, Valves), Applications
Advisor
Guanyun Wang, Zhejiang University
Overview
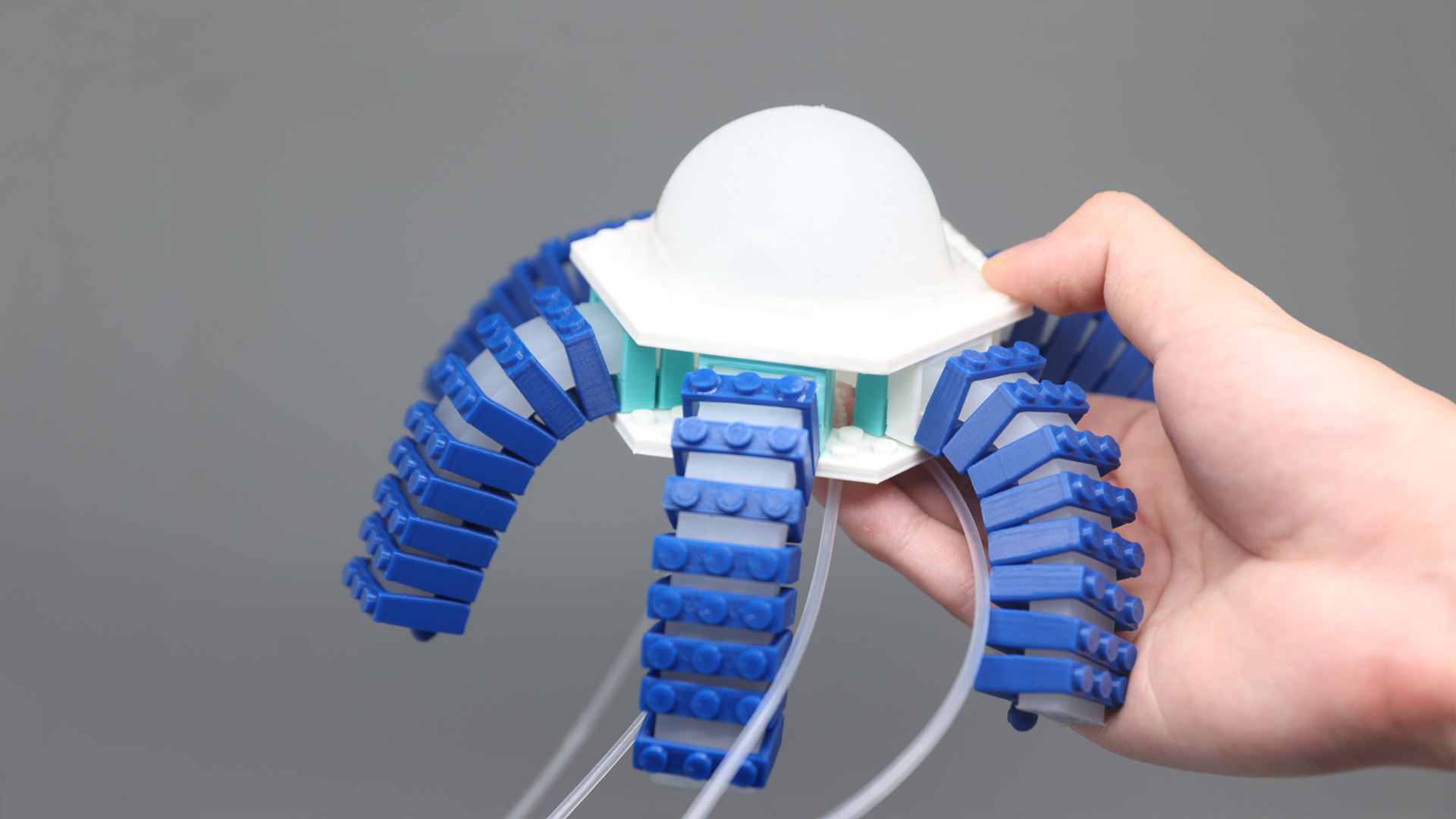
Biomimicry, a methodology adapted from nature, always inspires optimum solutions and innovative technologies in human history. To get children interested in, excited about, and inspired by biomimicry, we introduce KiPneu, a robotic platform that facilitates biomimicry education through hands-on, solution-oriented learning and a digital learning environment. KiPneu allows children to mimic flexible animal locomotion, like fish swimming or worm squirming, using low-cost building blocks and non-electrical pneumatic actuators. We provide five types of non-electrical tangible valves to adjust robot motion characteristics, such as direction and speed, through engaging tangible programming. Additionally, to facilitate the whole learning process, KiPneu comes with interactive instructional interface that visualize and simulate the pneumatic system. To validate KiPneu’s educational efficacy, we conducted a three-day workshop with 21 children aged 5-12. Pre-and-post surveys revealed KiPneu not only enhanced their understanding of animal locomotion mechanisms but also spurred interest in creative construction using acquired knowledge.